A gyártók és a kereskedelmi vállalatok egyre fejlettebb technológiákat alkalmaznak árukészletük követésére és raktárrendszerük támogatására. A raktárkészletek automatikus nyilvántartását követően egyre nagyobb igény mutatkozik a leltározási tevékenység robotizálása iránt is. A leltározási probléma különösen jelentős olyan raktárakban, ahol az alapanyagok illetve a félkésztermékek nincsenek ellátva azonosítókkal, és sem vonalkód sem RFID azonosítók nem alkalmazhatók gazdaságosan. Ilyen raktárak, például ahol fém- vagy műanyagipari félkésztermékeket, csöveket, szelvényeket, lemezeket tárolnak több raktári helyen, félig rendezett vagy ömlesztett formában. Ezeken a helyeken különösen nehéz megmondani, hogy a raktári nyilvántartórendszer által jelzett termékmennyiség ténylegesen megtalálható-e a raktárban, illetve, hogy melyik helyen pontosan hány darab található.
Projektünk célja, hogy egy olyan, mesterséges intelligenciával támogatott, gépi látáson alapuló, automata raktárleltározó robotrendszert hozzunk létre, amely lehetővé teszi az alapanyag- és félkésztermék-raktárak teljesen robotizált leltározását, amennyiben a tárolt árucikkekre a jó rálátás és megközelítés biztosítható.
A kialakítandó rendszer egy meglévő robotplatformra épülő, a projektben kifejlesztendő új leltározó robotegységből, egy központi vezérlőegységből és egy telefonos applikációból áll, amely az egyszerű kezelhetőséget biztosítja. Az új robotizált leltározó rendszer működése a következőképpen történik: A kezelő, vagy előre megadott időpontra ütemezi, vagy alkalomszerűen indíthatja el a telefonos applikáció segítségével a leltározást. A leltározó robotegység a központi egységgel folyamatosan kommunikálva, az előre beprogramozott útvonal szerint teljesen automata módon bejárja a raktárteret. A robot az egyes raktári tárolóhelyeknél a polcrendszerre, látható pontra felragasztott azonosító jelek segítségével áll pozícióba, majd indítja a gépi látással támogatott leltározási folyamatot. A leltározás a beprogramozott termék típusától függően lehet cső, szelvény, lemez, bála számlálása, vagy vonalkód felismerése és leolvasása, abban az esetben, ha a termék már azonosítóval van ellátva.
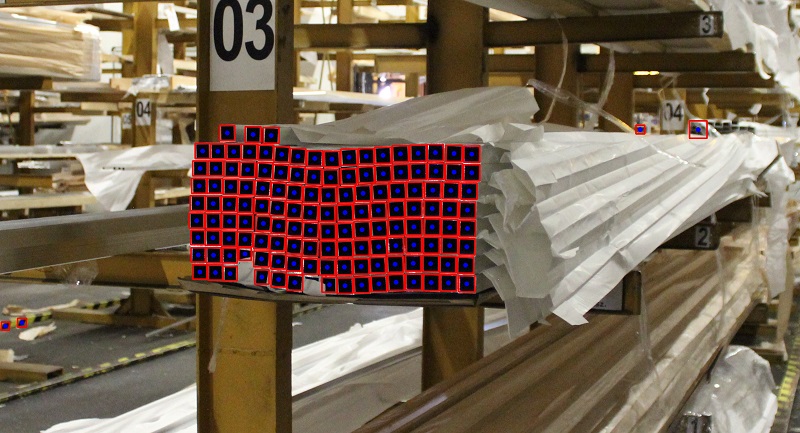
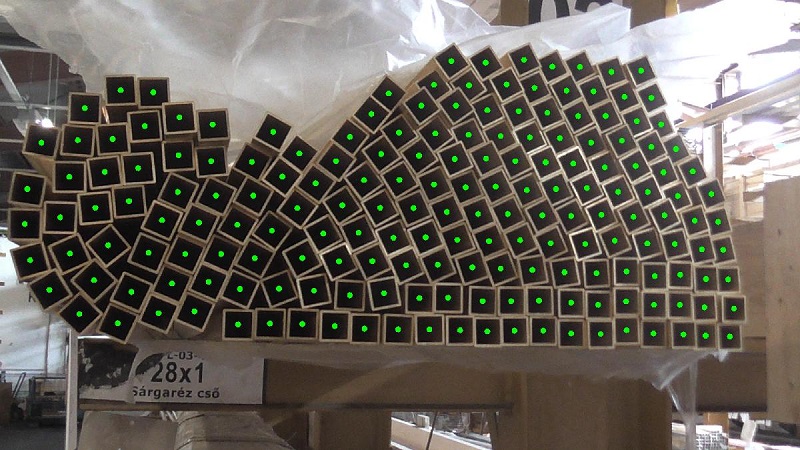
A kutatók megvizsgálták a jelenleg elérhető ipari látórendszerek funkcióit, modellezték a mesterséges intelligenciával támogatott, tanítható gépi látás folyamatait, a felismerhető, skálázható méretű termékgeometriákat, különös tekintettel a leggyakoribb cső, szelvény, doboz és bála alakzatok felismerhetőségére. Kísérletsorozatot végeztek a beszerzésre kerülő gépi látórendszerekkel, a féligrendezett termékek darabszámának felismerésére, mint például egy cső- vagy szelvénylerakat végéről készült felvételen a megjelenő körök illetve L, T, U zártszelvény-alakzatok megszámlálása. Végül modellezésre kerülnek a kiválasztott robotplatformra épülő robot optikai jelölőkkel történő, pozícióba állítási lehetőségei.
Fejlesztési oldalról a fő feladatot gépi látást megvalósító szenzorokat és vezérlőegység tervezése, a robot leltározási feladatainak tervezése és nyilvántartásra szolgáló adatbázis kidolgozása, a telefonos mobil alkalmazás funkcióinak tervezése, a leltározó robotot irányító központi rendszer adatbázisának és funkcióinak tervezése jelenti.
A 2020-1.1.2-PIACI-KFI-2020-00115 számú projekt a Nemzeti Kutatási Fejlesztési és Innovációs Alapból biztosított támogatással, a Piacvezérelt kutatás-fejlesztési és innovációs projektek támogatása (2020-1.1.2-PIACI KFI) pályázati program finanszírozásában valósult meg.